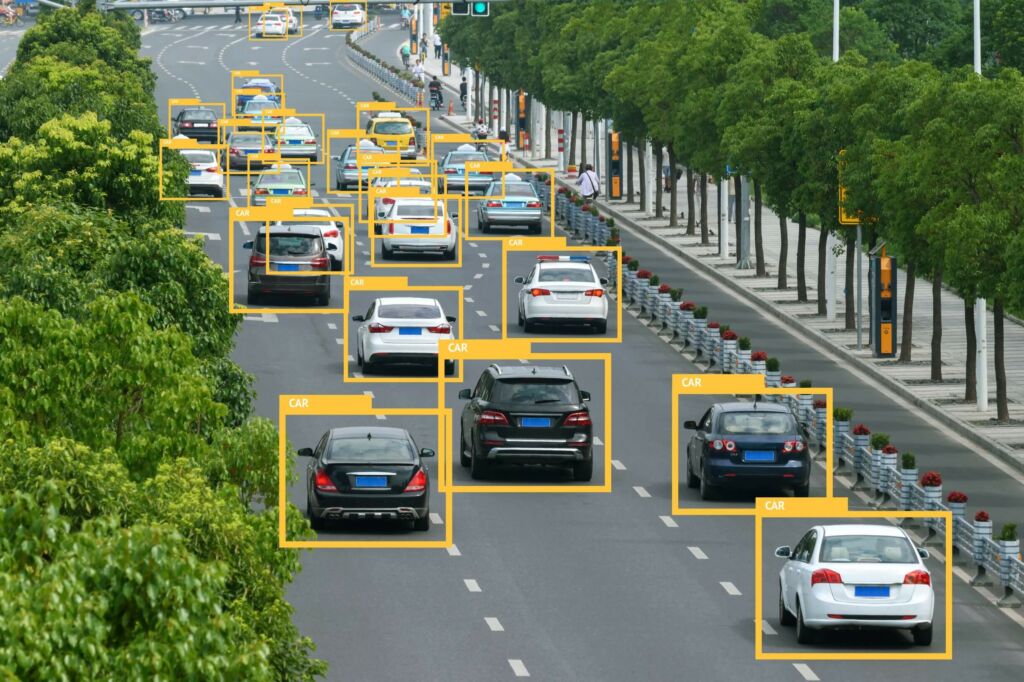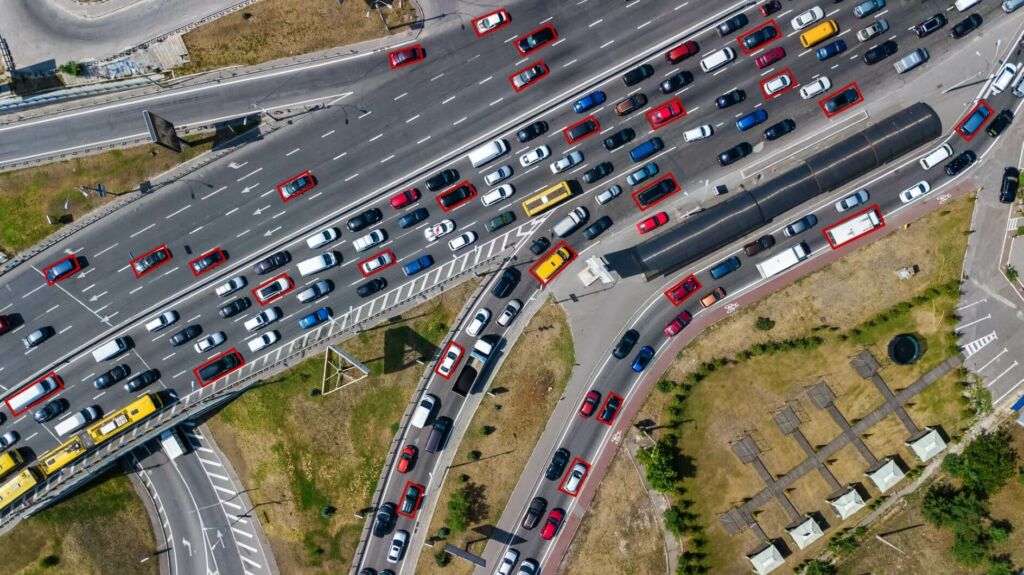
Detect and track objects
We annotate various objects like other vehicles, pedestrians, etc., in an image. To make each object identifiable by machines we annotate in a rectangle or square shape. Our annotation techniques allow the machine to differentiate between stationary objects and other moving objects on the road.
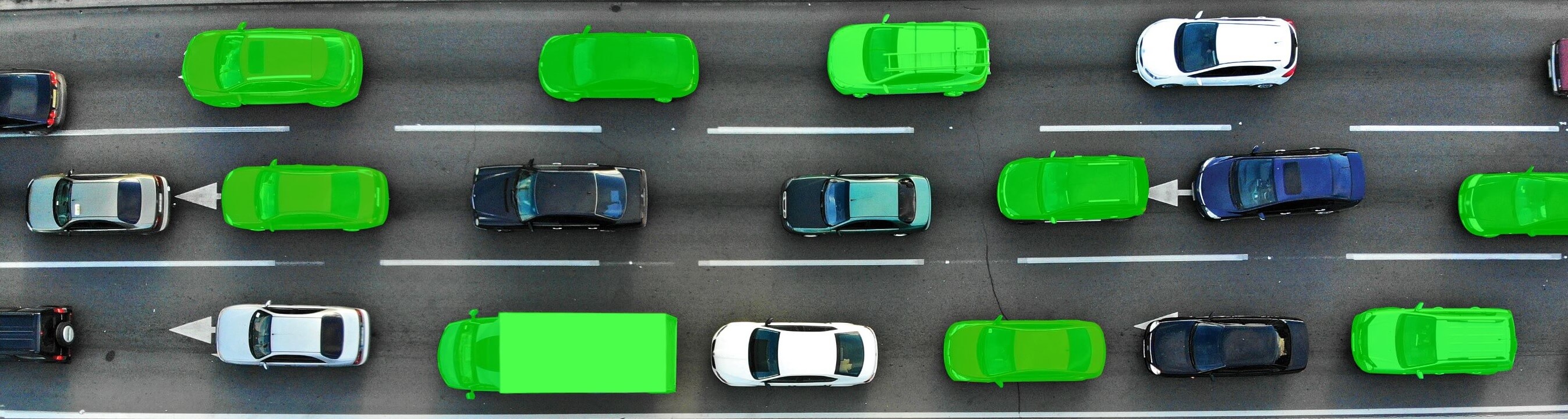
Lane detection
We use polyline image annotation for creating the training dataset for self-driving cars to be able to detect lanes on the road. We also annotate the different types of road lanes so the machine can clearly differentiate between single lane, double lanes, broken lanes, etc.